

RoboDK是一個工業機器人仿真編程軟件,為你簡化從設計到生產的過程,直觀的用戶界面,便于搭建虛擬工作環境,創建坐標系,設定機器人運動軌跡及目標,為多種工業應用預先進行離線編程。
軟件介紹
RoboDK是專業的工業機器人仿真離線編程軟件,可以利用這個軟件在電腦上編寫機器人程序、經過仿真與調試之后,加載到機器人控制器后即可運行。這類軟件的存在就是為了幫助用戶簡化從設計到生產的整個過程,使用軟件,您可以對工業機器人進行仿真,在PC電腦上可以直接為機器人控制器生成可讀程序。
軟件特色
1、取放
簡單的拾取與放置仿真。
2、使用Python取放
這個范例演示了如何使用Python來實現取放
3、機器人繪圖
用你的機器人仿真繪制SVG圖像文件,在項目中使用來自第三方的Python庫。
4、機器人銑削
把你的機器人變成CNC,輕松導入 NC-code (G-code 或 APT),生成機器人程序文件。
5、自動傳送帶
仿真機械傳送帶以及任何類似的機械裝置,使用Python應用程序編程接口。
6、DXF到機器人程序文件
將DXF圖形文件轉化成機器人程序文件。
7、使用機器人外軸銑削
同步機器人與外軸進行銑削。
8、噴涂
生成機器人路徑進行噴涂或者質量檢測。
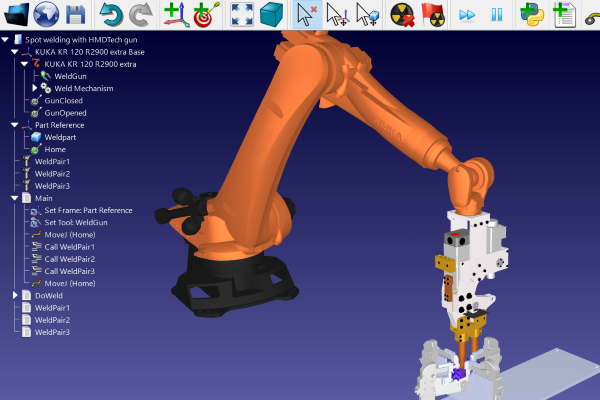
9、點焊
在軟件中簡單實現點焊與鉆孔
10、3D打印
使用工業機器人實現3D打印的簡單步驟
11、2D相機仿真
在自動生產線中嵌入2D相機進行視覺檢測。
12、離線編程
離線編程意味著在生產線外進行機器人編程。離線編程避免了在線編程導致的生產“停機”時間,通過離線編程與仿真可以更好地調試與規劃工作空間、避免出錯。
用合適的仿真器進行離線編程將最大化機器人系統的投資回報率。給機器人設計新任務所需要的時間由數周縮短到數天,短期生產也可實現“機器人化”。
13、用 RoboDK 實現離線編程
使用該軟件進行離線編程沒有限制。該軟件友好的用戶圖形界面方便了工業機器人仿真。應用程序編程接口(API)意味著您可以使用Python給機器人編程。該軟件支持多種品牌的機器人控制器,給您的機器人輸出相應的程序文件。您還可以根據需要編輯后處理器(Post Processor)。
Python讓您更快、更有效地整合您的系統。相較于其他編程語言來說,Python更簡單有效,并且容易學習。版本Python 3.7.3 將隨程序自動安裝.
該軟件用于Python 的應用程序編程接口(API)參考資料以及范例在 這里。該軟件的應用程序編程接口(API)與 C#(包括范例)以及 Matlab 也兼容。
14、機器人后處理器(Post Processor)
后處理器負責生成機器人程序文件。仿真中的任意機器人狀態可由后處理器轉化為相應的機器人指令。后處理器可以靈活滿足生成機器人程序文件時的特定要求。
該軟件為多數機器人品牌建立了后處理器。我們也可以根據需要生成適合您的后處理器。
更新內容
1、當程序以圓周運動結束時,改進了機器人的加工方法/退刀;
2、改進的相機模擬選項(最小化/頂級窗口);
3、改進了PNG文件壓縮;
4、改進的Techman后處理器;
5、改進了斗山機器人的運動學;
6、使用大型項目??時改善了縮放(縮放相對于鼠標光標下方的對象發生);
7、添加了將曲線轉換為點的選項;
8、添加了將點轉換為曲線的選項;
9、改進了Jaka機器人的運動學;
10、方向變化時,運動過濾不適用;
11、更改了默認選項,以使機器人加工項目的圓角為1毫米(工具-選項-CAM-程序事件);
12、改進了G02和G03導入支持半徑命令;
13、為Techman機器人添加了后處理器;
14、簡化幾何形狀可刪除較小或無效的三角形(工具-選項-顯示);
15、改進的韓語翻譯;
16、添加了默認設置以設置轉盤;
17、改進了WRML文件導入;
18、解決了命令行參數-NEWINSTANCE的問題;
19、使用大型項目時提高了復制/粘貼速度;
20、改進的KUKA IIWA后處理器(線性和線性);
21、添加了Motoman后處理器以生成笛卡爾坐標系中的所有目標(僅Motoman笛卡爾坐標系);
22、添加了重新批量計算目標的選項;
23、使用外軸時改善了軌跡顯示;
24、添加了運行最后一個腳本的選項(Shift + L);
25、添加了VScode文本編輯器擴展;
26、庫中的示例已更新/改進,并帶有教程鏈接;
27、改進的Aubo后處理器;
28、提高了加載速度;
29、修復了Denso后處理器錯誤。

精品推薦
-

IntelliJ IDEA 2019
詳情 -

Microsoft VC++6.0安裝包
詳情 -

Microsoft VC++2015版運行庫
詳情 -
VC++2019運行庫
詳情 -

RobotStudio
詳情 -

Intel Visual Fortran
詳情 -

Microsoft Visual Studio 2022
詳情 -

Microsoft VC++2010運行庫安裝包
詳情 -

編程貓源碼編輯器4.0版本
詳情 -
VBSEdit9
詳情 -

ABPLC RSLogix5000編程軟件
詳情 -

Keil uVision5
詳情 -

WeDo 2.0
詳情 -

鯨魚虛擬機器人軟件
詳情 -

羅克韋爾RSLogix500中文漢化版
詳情 -

GX Works2
詳情
-
本類熱門推薦本類熱門標簽
-
詳情
 博途v15破解版安裝包 (附授權密鑰)V15.1
27.01GB / 3分
博途v15破解版安裝包 (附授權密鑰)V15.1
27.01GB / 3分
-
詳情
 microsoft visual studio 2019免費版 (附密鑰激活碼)V16.11.2
1.14MB / 3分
microsoft visual studio 2019免費版 (附密鑰激活碼)V16.11.2
1.14MB / 3分
-
詳情
Microsoft VC++2010運行庫安裝包 官方正版
10.2MB / 3分
-
詳情
 寶玉編程助手 最新版v0.0.05
6.22MB / 3分
寶玉編程助手 最新版v0.0.05
6.22MB / 3分
-
詳情
 Python IDLE 中文版 v3.7
632KB / 3分
Python IDLE 中文版 v3.7
632KB / 3分
-
詳情
Microsoft Visual Studio 2022 中文正式版v17.0.0
1.32MB / 3分
-
詳情
 IDM UEStudio Pro 官方版v20.10
101.97MB / 3分
IDM UEStudio Pro 官方版v20.10
101.97MB / 3分
-
詳情














裝機必備軟件
網友評論