

robodk破解版是軟件的破解版本,在該版本中為用戶提供了破解補丁,可以對軟件進行激活,免費使用軟件的所有功能。這是一款機器人仿真軟件,通過這款軟件可以幫助用戶進行機器人程序的編寫,通過自己編寫的程序對機器人進行控制,利用機器人完成非常多的工作,你可以在你的pc電腦上面對機器人進行仿真,直接編寫代碼輸入機器人控制器,生成可調式的程序,另外,相比于人工而言,采用軟件進行仿真編程,能夠避免不必要的錯誤,從而縮短項目時間。

軟件功能
1、取放
簡單的拾取與放置仿真。
2、使用Python取放
這個范例演示了如何使用Python來實現取放
3、機器人繪圖
用你的機器人仿真繪制SVG圖像文件,在項目中使用來自第三方的Python庫。
4、機器人銑削
把你的機器人變成CNC,輕松導入 NC-code (G-code 或 APT),生成機器人程序文件。
5、自動傳送帶
仿真機械傳送帶以及任何類似的機械裝置,使用Python應用程序編程接口。
6、DXF到機器人程序文件
將DXF圖形文件轉化成機器人程序文件。
7、使用機器人外軸銑削
同步機器人與外軸進行銑削。
8、噴涂
生成機器人路徑進行噴涂或者質量檢測。
9、點焊
在軟件中簡單實現點焊與鉆孔
10、3D打印
使用工業機器人實現3D打印的簡單步驟
11、2D相機仿真
在自動生產線中嵌入2D相機進行視覺檢測。
12、離線編程
離線編程意味著在生產線外進行機器人編程。離線編程避免了在線編程導致的生產“停機”時間,通過離線編程與仿真可以更好地調試與規劃工作空間、避免出錯。
用合適的仿真器進行離線編程將最大化機器人系統的投資回報率。給機器人設計新任務所需要的時間由數周縮短到數天,短期生產也可實現“機器人化”。
13、用 RoboDK 實現離線編程
使用該軟件進行離線編程沒有限制。該軟件友好的用戶圖形界面方便了工業機器人仿真。應用程序編程接口(API)意味著您可以使用Python給機器人編程。該軟件支持多種品牌的機器人控制器,給您的機器人輸出相應的程序文件。您還可以根據需要編輯后處理器(Post Processor)。
Python讓您更快、更有效地整合您的系統。相較于其他編程語言來說,Python更簡單有效,并且容易學習。版本Python 3.7.3 將隨程序自動安裝.
該軟件用于Python 的應用程序編程接口(API)參考資料以及范例在 這里。該軟件的應用程序編程接口(API)與 C#(包括范例)以及 Matlab 也兼容。
14、機器人后處理器(Post Processor)
后處理器負責生成機器人程序文件。仿真中的任意機器人狀態可由后處理器轉化為相應的機器人指令。后處理器可以靈活滿足生成機器人程序文件時的特定要求。
該軟件為多數機器人品牌建立了后處理器。我們也可以根據需要生成適合您的后處理器。
軟件特色
1、機器人加工
像5軸銑床(CNC)或3D打印機一樣使用機械臂。模擬并將NC程序轉換為機器人程序(G代碼或APT-CLS文件)。RoboDK將自動優化機器人路徑,避免奇異,軸限制和碰撞。
2、離線編程軟件
工業機器人的仿真和離線編程從未如此簡單。創建您的虛擬環境以在幾分鐘內模擬您的應用程序。
輕松為任何機器人控制器離線生成機器人程序。您不再需要學習特定于供應商的編程。
3、機器人庫
訪問來自40多個不同機器人制造商的廣泛的工業機器人手臂,外軸和工具庫。輕松將任何機器人用于任何應用,例如機械加工,焊接,切割,噴涂,檢查,去毛刺等!
4、機器人精度
您的機械臂不夠準確嗎?
校準機械臂以提高準確性和生產結果。運行ISO9283機器人性能測試。
5、將程序導出到您的機器人
后處理器支持許多機器人控制器,包括:
ABB RAPID(mod / prg)
Fanuc LS(LS / TP)
庫卡KRC / IIWA(SRC / java)
Motoman通知(JBI)
通用機器人(URP /腳本)
破解教程
1、從艾薇下載站下載軟件壓縮包,并進行解壓處理
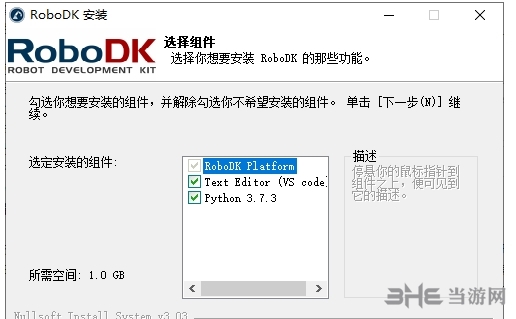
2、運行安裝程序,勾選所需要的功能要件
3、設置軟件安裝路徑,不建議放置在C盤內
4、等待軟件完成安裝
5、安裝完成后取消運行RoboDK選項
6、將Crack文件復制到安裝路徑當中
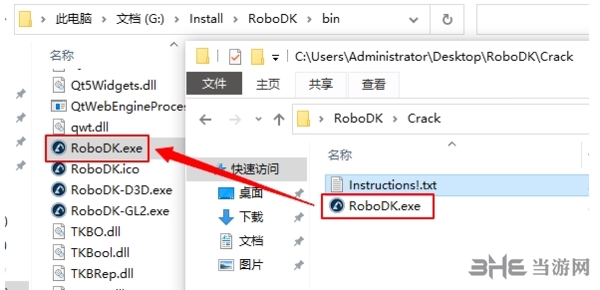
7、運行軟件即可免費使用

快捷鍵說明
Alt:參照其它項目移動參考坐標系、物體或機器人
Alt + Shift:移動工具(TCP)參考坐標系
Ctrl + P:獲取截屏
F1:顯示快速入門指導
*:顯示/隱藏機器人工作空間范圍
+:放大坐標軸顯示尺寸
-:縮小坐標軸顯示尺寸
/:顯示/隱藏文本
Ctrl + 1:加載最近的文件或者工作站
使用說明
一、新項目
項目中使用的所有機械手,對象和工具都保存為工作站(RDK文件)。工作站包含與機器人,工具,參考系,目標,對象和其他參數有關的所有設置。站存儲在一個文件中(RDK擴展名)。
由于將機器人文件,工具和對象另存為一個RDK文件,因此無需保留它們的單獨副本。
請按照以下步驟創建一個新的項目(RDK站):
1.從以下網站下載并安裝
2.雙擊桌面上的快捷方式
3.如果其他工作站已打開:
選擇文件→新建工作站(Ctrl+N)開始一個新項目。
可以同時打開多個項目。雙擊樹中的“站”圖標將激活并顯示該項目。
二、選擇一個機器人
可以從PC或該軟件的在線庫中將新的機器人添加到您的項目中。
請按照以下步驟從在線庫中選擇一個機器人:
1.選擇文件→打開在線庫(Ctrl+Shift+O)。將會出現一個新的嵌套窗口,顯示在線圖書館。也可以在工具欄中選擇相應的按鈕。
2.使用過濾器按品牌,有效載荷等找到您的機器人。
在此示例中,我們將使用UR10機器人(有效載荷機器人為10 kg,到達范圍為1.3 m)。
3.選擇下載。機器人會在幾秒鐘內自動出現在工作站中。
4.裝載機器人后,可以關閉在線庫
提示:在在線庫中選擇重置過濾器將刪除所有使用的過濾器。
提示:另外,也可以從以下網站單獨下載機器人文件(.robot擴展名),然后通過將文件拖放到主窗口或通過以下方式在該軟件中打開它們:選擇文件→打開。
注意:每次在該軟件中加載新的機械手時,都會添加一個新的參考框架來表示機械手的基礎框架。
注意:從在線庫中加載機械手會將其存儲在本地庫中。該示例項目的默認位置是:C:/RoboDK/Library/Tutorial-UR-Painting.rdk。
三、添加參考框架
參考框架允許相對于機器人或相對于3D空間中的其他對象放置對象(包括位置和方向)。
注意:有關參考框架的更多信息,請參見“參考框架”部分。
要添加新的參考系:
1。選擇程序
或者,在工具欄中選擇等效按鈕
2。雙擊參考系(在樹上或在主屏幕上的3D幾何體上)以輸入圖像中顯示的坐標(X,Y,Z位置和方向的歐拉角)。每種情況下都可以使用鼠標滾輪來快速更新主屏幕上參考框架的位置。
默認情況下使用以下顏色:
X坐標→紅色
Y坐標→綠色
Z坐標→藍色
第一次歐拉旋轉→青色
第2次Euler旋轉→洋紅色
第三次歐拉旋轉→黃色
提示:選擇工具→選項→顯示→顯示XYZ軸字母以查看坐標系軸。
3。選擇查看→使參考框架變大(+)以增加參考框架的大小
4。選擇查看→使參考框架變小(-)以減小參考框架的大小
5,選擇查看→在屏幕上顯示/隱藏文本(/)以顯示或隱藏屏幕上的文本
6。(可選)通過選擇F2重命名樹中的任何參考框架或對象
如果使用了多個參考系,則可以將它們拖放到“站樹”中,以匹配實際設置中存在的依存關系。例如,參考框架2可以相對于機器人基座參考放置。在這種情況下,如果UR10基本參考已移動,則框架2也隨之移動。如果使用其他機器人或參考框架,請務必考慮到這一點。下圖顯示了依賴關系的差異。
提示:按住鼠標右鍵單擊,將參考框架(或任何其他項目)拖放到樹中(在其他項目之前,之后或作為嵌套項目),以重新排序工作站樹中的項目。
即使依賴性不同,也可以輸入或檢索任何參考框架相對于任何其他參考框架的坐標,如下圖所示。大多數機器人控制器都需要參考框架相對于機器人基礎框架的坐標。
按住Alt鍵或在工具欄中選擇相應的按鈕,也可以在主屏幕中移動參考框架。然后,在屏幕上用鼠標拖動參考。在移動參考時,將更新相應的坐標值。
標簽: 機器人編程

精品推薦
-

IntelliJ IDEA 2019
詳情 -

Microsoft VC++6.0安裝包
詳情 -

Microsoft VC++2015版運行庫
詳情 -
VC++2019運行庫
詳情 -

RobotStudio
詳情 -

Intel Visual Fortran
詳情 -

Microsoft Visual Studio 2022
詳情 -

Microsoft VC++2010運行庫安裝包
詳情 -

源碼編輯器4.0
詳情 -
博途V18破解授權軟件
詳情 -

GX Works2
詳情 -

microsoft visual studio 2019免費版
詳情 -
hypermill2021超級加密狗破解版
詳情 -

西門子博途v17破解版
詳情 -

星三好圖形化編程軟件官方最新版
詳情 -
VBSEdit9
詳情
-
本類熱門推薦本類熱門標簽
-
詳情
博途v15破解版安裝包 (附授權密鑰)V15.1
27.01GB / 3分
-
詳情
microsoft visual studio 2019免費版 (附密鑰激活碼)V16.11.2
1.14MB / 3分
-
詳情
Microsoft VC++2010運行庫安裝包 官方正版
10.2MB / 3分
-
詳情
 寶玉編程助手 最新版v0.0.05
6.22MB / 3分
寶玉編程助手 最新版v0.0.05
6.22MB / 3分
-
詳情
 Python IDLE 中文版 v3.7
632KB / 3分
Python IDLE 中文版 v3.7
632KB / 3分
-
詳情
Microsoft Visual Studio 2022 中文正式版v17.0.0
1.32MB / 3分
-
詳情
 IDM UEStudio Pro 官方版v20.10
101.97MB / 3分
IDM UEStudio Pro 官方版v20.10
101.97MB / 3分
-
詳情















裝機必備軟件
網友評論