
RobotStudio破解版是款非常實用的仿編程工具,這軟件能夠讓你在短時間內快速完成編程,在你的電腦里制作一個虛擬機器人,給你帶來超真實的體驗,該版本支持免費下載,喜歡的用戶們千萬不要錯過哦!
軟件介紹
RobotStudio備受到編程人員們的喜愛,軟件支持離線編程,這樣你就需要擔心網絡問題。該軟件可以讓你在辦公室里真實體驗到現場生產的過程,讓你能夠通過機器人來進行設計。軟件支持各種CAD格式,你可以將這些數據進行導入,能夠快速完成相關編程,從而提高你的工作效率。
RobotStudio能夠在短時間內,將CAD模型進行自動編寫,根據你所需要的內容,展現出機器人跟蹤的路線與位置,進行自動生成。該軟件是非常不錯的,喜歡的用戶們一起來看看吧!
軟件功能
1、CAD導入:RobotStudio可方便地導入各種主流CAD格式的數據,包括IGES、STEP、VRML、VDAFS、ACIS及CATIA等。機器人程序員可依據這些精確的數據編制精度更高的機器人程序,從而提高產品質量。
2、AutoPath:RobotStudio中最能節省時間的功能之一。該功能通過使用待加工零件的CAD模型,僅在數分鐘之內便可自動生成跟蹤加工曲線所需要的機器人位置(路徑),而這項任務以往通常需要數小時甚至數天。
3、程序編輯器:程序編輯器(ProgramMaker)可生成機器人程序,使用戶能夠在Windows環境中離線開發或維護機器人程序,可顯著縮短編程時間、改進程序結構。
4、路徑優化:如果程序包含接近奇異點的機器人動作,RobotStudio可自動檢測出來并發出報警,從而防止機器人在實際運行中發生這種現象。仿真監視器是一種用于 機器人運動優化的可視工具,紅色線條顯示可改進之處,以使機器人按照最有效方式運行。可以對TCP速度、加速度、奇異點或軸線等進行優化,縮短周期時間。
5、Autoreach:Autoreach可自動進行可到達性分析,使用十分方便,用戶可通過該功能任意移動機器人或工件,直到所有位置均可到達,在數分鐘之內便可完成工作單元平面布置驗證和優化。
6、虛擬示教臺:是實際示教臺的圖形顯示,其核心技術是VirtualRobot。從本質上講,所有可以在實際示教臺上進行的工作都可以在虛擬示教臺(QuickTeach™)上完成,因而是一種非常出色的教學和培訓工具。
7、事件表:一種用于驗證程序的結構與邏輯的理想工具。程序執行期間,可通過該工具直接觀察工作單元的I/O狀態。可將I/O連接到仿真事件,實現工位內機器人及所有設備的仿真。該功能是一種十分理想的調試工具。
8、碰撞檢測:碰撞檢測功能可避免設備碰撞造成的嚴重損失。選定檢測對象后,RobotStudio可自動監測并顯示程序執行時這些對象是否會發生碰撞。
9、Visual Basic for Applications:可采用VBA改進和擴充RobotStudio功能,根據用戶具體需要開發功能強大的外接插件、宏,或定制用戶界面。
10、PowerPac's:ABB協同合作伙伴采用VBA進行了一系列基于RobotStudio的應用開發,使RobotStudio能夠更好地適用于弧焊、彎板機管理、點焊、CalibWare(絕對精度)、葉片研磨以及BendWizard(彎板機管理)等應用。
11、直接上傳和下載:整個機器人程序無需任何轉換便可直接下載到實際機器人系統,該功能得益于ABB獨有的VirtualRobot技術。
怎么改時間
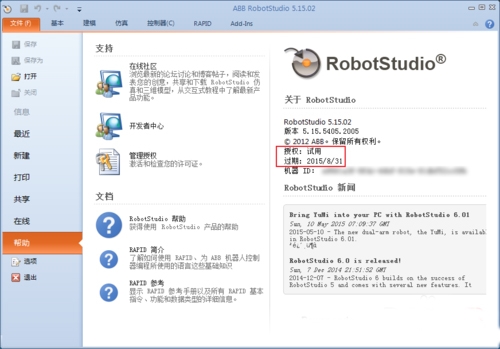
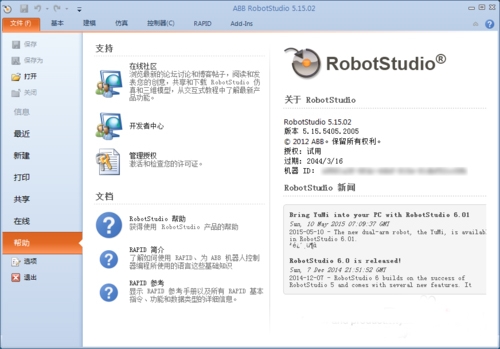
1.我們先查看軟件試用到期日期,打開軟件后,點擊"幫助"紅色圈中
2.軟件顯示到期日期為8月31日,下面我們來修改到期日期
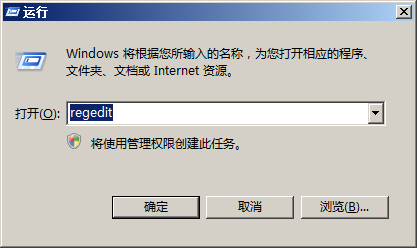
3.打開運行框,直接按"Win鍵"+"R鍵" ,在彈出的對話框中,輸入
"regedit"如下圖,不含雙引號(Win鍵就是你鍵盤上那個微軟LOGO的按鍵)
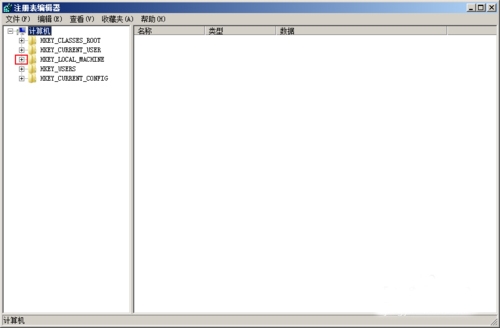
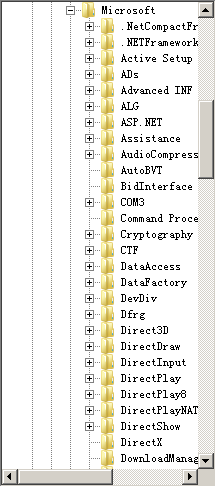
4.打開后如下圖,如果你的打開出錯請檢查下是否輸入有誤,我們打開注冊表的路徑為“HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\SLP Services“64位的為”HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\SLP Services“我們一步步來,點擊圖中紅圈中的+
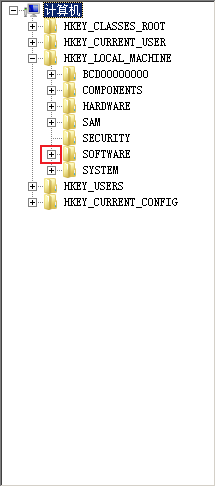
5.點開后如下,在點擊紅圈中的+
6.點開后如下,在點擊紅圈中的+
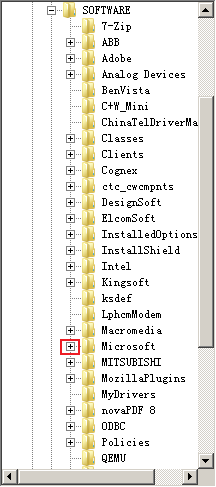
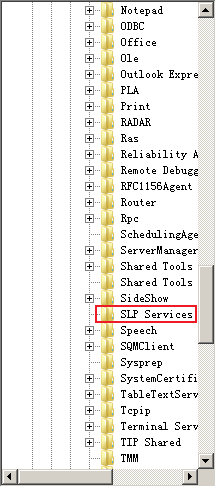
7.點開后如下,我們拖動滑條往下找”SLP Services“這一項
8.找到后如下,我們點擊”SLP Services“
9.左鍵點擊之后如下
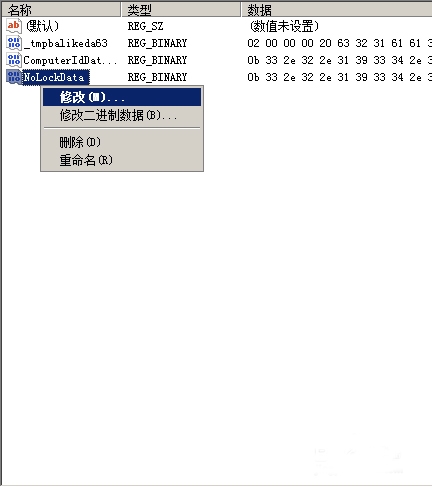
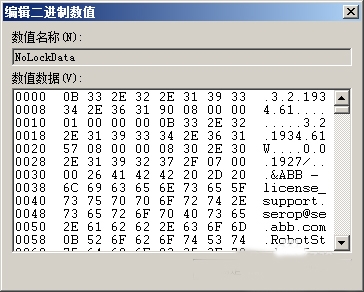
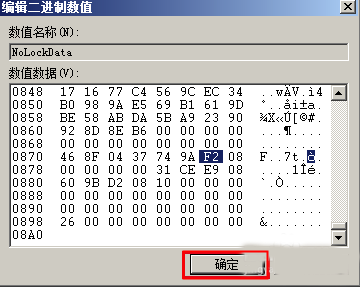
10.我們在”NoLockData“上右鍵,點擊”修改“
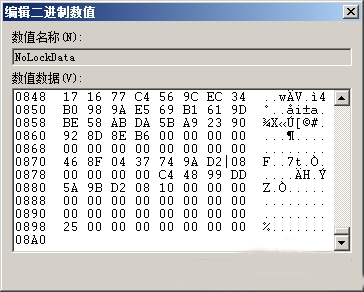
11.彈出一個數據編輯框,我們拖動滑條到最后
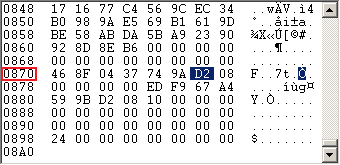
12.拖到最后如下,我們找到紅色圈中的”0807“那一行,選中 D2 那一項,按鍵盤F鍵再按數字2,就修改好了。(15年是D2,16年就是D3,依次類推,一定先選中!不然修改不了!!!)
13.把 D2 修改成 F2就可以了,如下圖,點擊”確定“,不點擊修改不生效,如果你的修改不成功請仔細檢查下與我那里不一樣
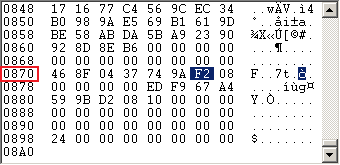
14.再次打開,點擊”幫助“日期就變成2044年了,應該夠用了。
怎么導入模型
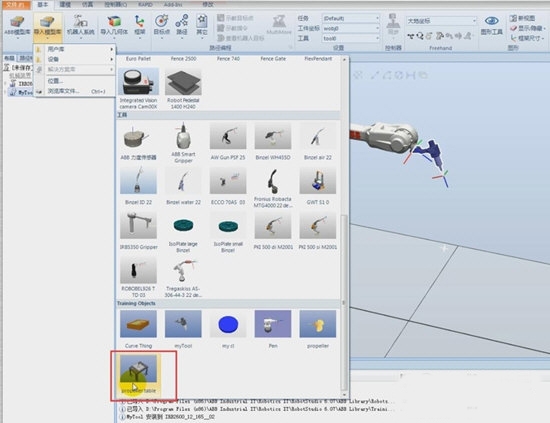
1、在“基本”功能選項卡中,在“導入模型庫”下拉“設備”列表中選擇“propeller table”模型進行導入。
2、在“布局”中,選中機器人本體,單擊右鍵,選擇“顯示機器人工作區域”。白色區域為機器人可到達范圍。
3、工作對象應調整到機器人的最佳工作范圍,這樣才可以提高節拍和方便軌跡規劃。下面將小桌子移到機器人的工作區域。
要移動對象,則要用到Freehand工具欄功能。在Freehand工具欄中,選定“大地坐標”和單擊“移動”按鈕。拖動箭頭到達合適位置。
4、在“基本”功能選項卡中,選擇“導入模型庫”,在下拉“設備”列表中選擇“Curve Thing”,進行模型導入。
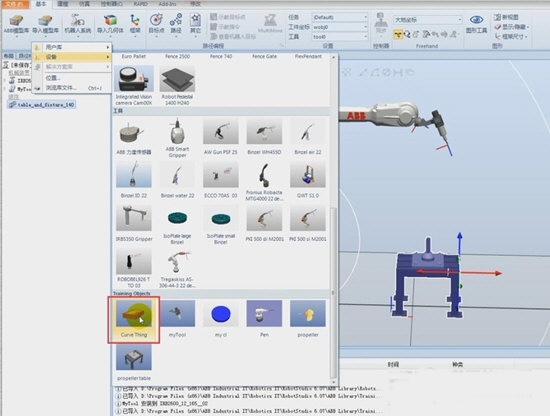
5、將“Curve Thing”放置到小桌子上去。在對象上單擊右鍵,選擇“位置”單擊“放置”中的“兩點”。
為了能夠準確捕捉對象特征,需要正確地選擇捕捉工具。將鼠標移動到對應的捕捉工具,則會顯示詳細的說明。
6、選中捕捉工具的“選擇部件”和“捕捉末端”。
7、單擊“主點-從”的第一個坐標框。
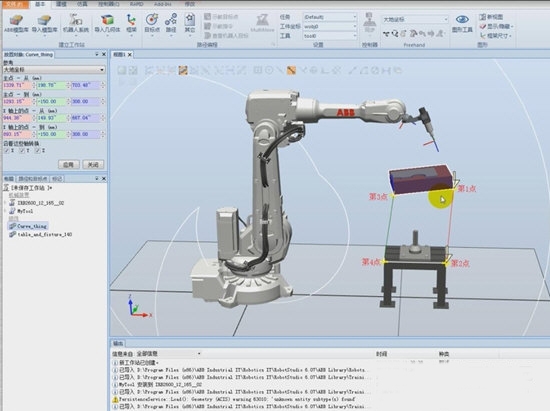
8、按照順序單擊兩個物體對齊的基準線:
第1點與第2點對齊;
第3點與第4點對齊。
9、對象點位的坐標值已自動顯示在框中,然后單擊“應用”。
10、對象已準確對齊放置到小桌子上。
怎么創建工作站
1.首先打開RobotStudio軟件

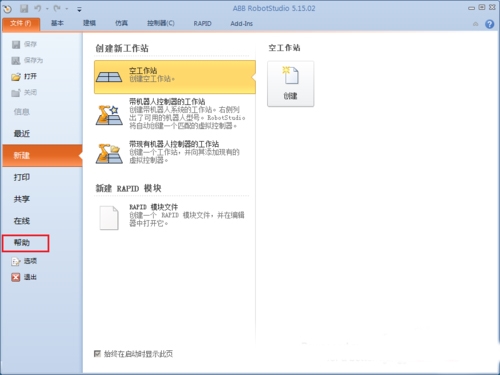
2.選擇“空工作站”,鼠標左鍵點擊“創建”
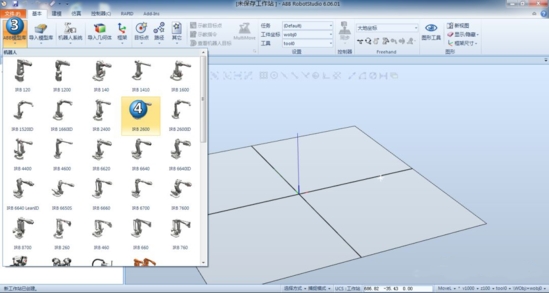
3.在ABB模型庫中選擇自己喜歡的機器人,這里選擇“IRB2600”機器人

4.選擇“導入模型庫”的下拉菜單,選擇“設備”下拉菜單,將滾動條向下拉,選擇一個工具,這里選擇“AW_Gun PSF 25”
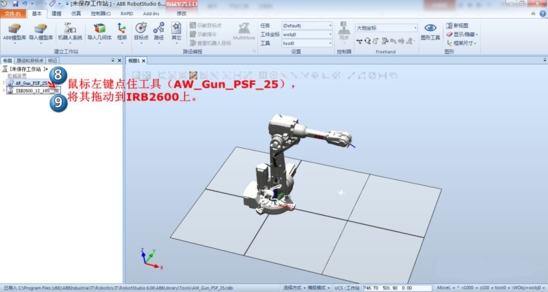

按上圖提示將工具拖放到機器人上(RobotStudio軟件自備模型庫都是處理好的,可以實現簡單拖放就可以安裝在機器人上,外部工具模型就需要一些處理了,之后會講怎樣處理外部工具模型)到這里機器人和工具就導入完了
到這之后我們可能需要改變視角來進行布局操作,所以我們來了解一下常用的三組快捷鍵:
Ctrl+鼠標左鍵:平移
Ctrl+Shift+鼠標左鍵:旋轉
鼠標滾輪:縮放
接下來讓我們繼續布局

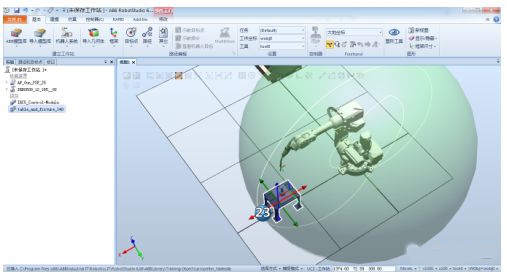
5.為工作站添加一個控制柜
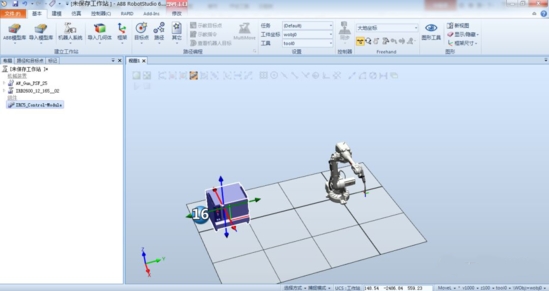
6.默認控制柜是導入到這里的,我們要將其移動出來。所以這里我們選擇移動工具(第14步),然后點擊控制柜就會出現可拖動箭頭,拖動綠色箭頭將控制柜線性移動到一邊。
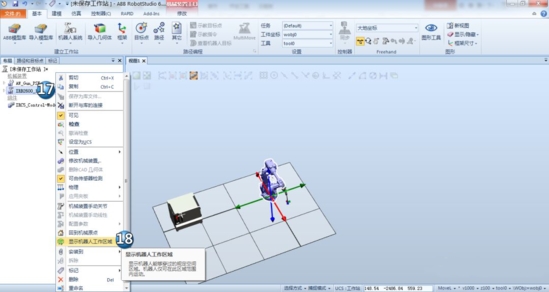
7.按上圖步驟查看一下機器人工作區域,盡量將控制柜移動到機器人工作區域之外。

為了更直觀勾選“3D體積”
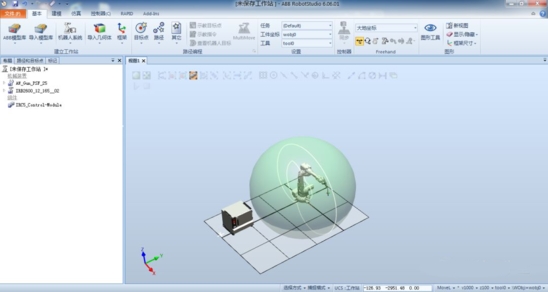
上圖為工作區域3D效果
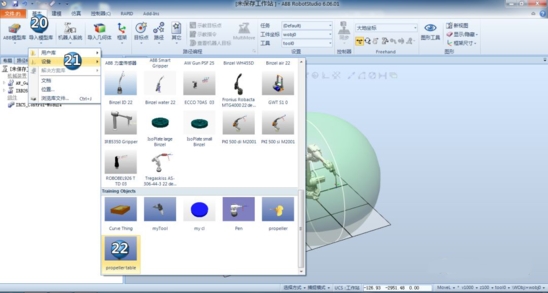
8.接下來導入一個小桌子,將其拉出,但其要在機器人工作區域內。
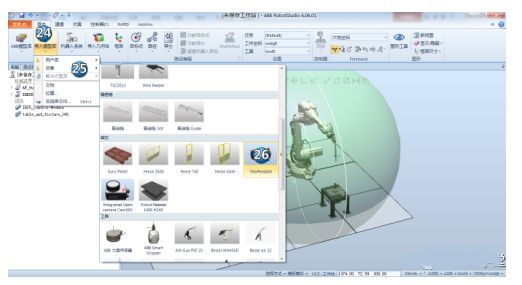
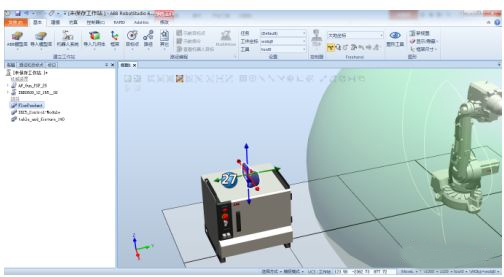
9.還可以導入一個示教器,將其放在控制柜上。
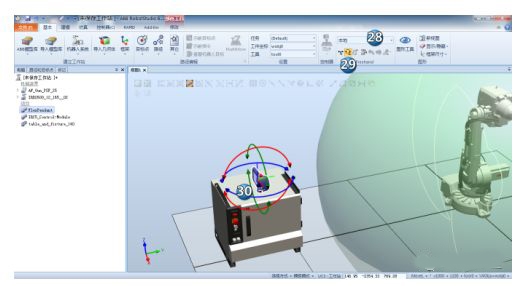
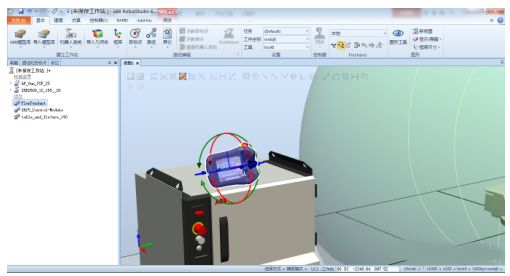
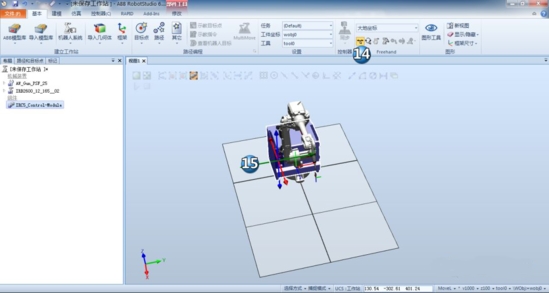
10.為了更真實,可以對其進行旋轉,參考坐標系選擇為“本地”(步驟28),工具選擇“旋轉”(步驟29)
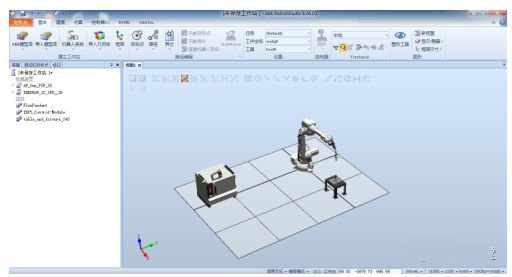
11.到此布局就差不多了,如果還想更真實一些可以添加圍欄,還可以添加其他的模型庫里面的設備。↓

使用技巧
1、雙擊桌面圖標,打開軟件,選擇“空工作站”,點擊“創建”按鈕;
2、點擊“ABB模型庫”工具,在彈出的下拉菜單下選擇“IRB 1410”,相應的機器人出現在軟件工作區;
3、點擊“導入模型庫”工具,選擇“設備”→點擊,模型被添加到工作區;
4、點擊“移動”工具,在基座上出現三色直角坐標系,鼠標點擊任意坐標軸拖動鼠標,將基座移動到合適位置;
5、點擊“導入模型庫”工具,選擇“設備”→點擊 ,模型被添加到工作區;
6、在右側瀏覽樹中鼠標點擊剛添加的工具,并拖動至瀏覽樹中的機器人上,在彈出的對話框中,點擊“是”按鈕,工具被添加到機器人六軸法蘭上。
標簽: 編程軟件
相關版本

精品推薦
-

IntelliJ IDEA 2019
詳情 -

Microsoft VC++6.0安裝包
詳情 -

Microsoft VC++2015版運行庫
詳情 -
VC++2019運行庫
詳情 -

RobotStudio
詳情 -

Intel Visual Fortran
詳情 -

Microsoft Visual Studio 2022
詳情 -

Microsoft VC++2010運行庫安裝包
詳情 -

ABPLC RSLogix5000編程軟件
詳情 -

Dependency Walker
詳情 -

西門子博途v17破解版
詳情 -

Ghidra反匯編
詳情 -

源碼編輯器4.0
詳情 -
hypermill2021超級加密狗破解版
詳情 -

GX Works2
詳情 -

roboguide中文破解版
詳情
-
本類熱門推薦本類熱門標簽
-
詳情
博途v15破解版安裝包 (附授權密鑰)V15.1
27.01GB / 3分
-
詳情
 microsoft visual studio 2019免費版 (附密鑰激活碼)V16.11.2
1.14MB / 3分
microsoft visual studio 2019免費版 (附密鑰激活碼)V16.11.2
1.14MB / 3分
-
詳情
Microsoft VC++2010運行庫安裝包 官方正版
10.2MB / 3分
-
詳情
 寶玉編程助手 最新版v0.0.05
6.22MB / 3分
寶玉編程助手 最新版v0.0.05
6.22MB / 3分
-
詳情
 Python IDLE 中文版 v3.7
632KB / 3分
Python IDLE 中文版 v3.7
632KB / 3分
-
詳情
Microsoft Visual Studio 2022 中文正式版v17.0.0
1.32MB / 3分
-
詳情
 IDM UEStudio Pro 官方版v20.10
101.97MB / 3分
IDM UEStudio Pro 官方版v20.10
101.97MB / 3分
-
詳情
-
2 Emacs















裝機必備軟件
網友評論