



HyperIMU陀螺儀修復器是一個非常好用的陀螺儀修復工具,可以更加清楚的了解到相關的參數數據,定義相關功能服務等等,支持兩種網絡協議,包含了TCP,UDP傳感數據,可以將文件集中進行脫機處理,輕松查看運行時的信號圖,功能很全面,可自定義設置參數,HyperIMU支持永久連接,人性化簡潔無廣告的界面操作,可以幫你將你的設備變成功能強大的傳感器。用戶只需將軟件與設備進行連接,就能進行簡單的操作!

軟件特色
1、對于陀螺儀,軟件具備超頻處理功能,可進行個性化調整。
2、hyperlmu修復陀螺儀廣泛兼容多種平臺,適用于各類型游戲。
3、內置自動修復機制能迅速解決常見錯誤,提高修復效率。

軟件功能
1、支持兩種常見的數據格式,無論你的數據是哪種格式,這款軟件都能輕松應對。
2、可以根據自己的需求,手機上自定義傳感器列表,實現數據的流式傳輸。
3、支持多種網絡流協議,如UDP和TCP,確保數據在不同網絡環境中的穩定傳輸。

軟件亮點
1、多功能性,可以滿足不同用戶的需求;
2、修復效率高,能夠快速解決游戲問題;
3、穩定可靠,可以保證游戲運行的穩定性。
軟件魅力
1、重新校準陀螺儀:
打開設備的設置菜單,查找包含“陀螺儀”的選項。
選擇“重新校準”功能,并根據設備提供的指導完成一系列動作,確保操作環境穩定。
2、更新或重置軟件:
如果問題是由軟件錯誤導致的,首先嘗試更新操作系統的最新版本和相關應用程序。
如果更新無法解決問題,考慮將設備恢復到出廠設置的選項。
3、檢查硬件連接和電源供應:
確認陀螺儀是否正確連接到了電路板上,并且有穩定的電力供應。
如果發現連接松動或有接觸不良的情況,清潔接觸點后重新插拔連接線。
4、尋求專業幫助:
如果上述所有步驟都無法解決問題,建議聯系專業技術人員進行檢查。
專業技術人員可能會需要進一步檢查內部硬件組件,以便準確識別故障原因并進行必要的維修工作。

推薦理由
1.功能非常齊全,可以為用戶解決游戲運行中的各項問題。
2.支持語言切換功能,滿足不同用戶的語言需求。
3.頁面設計十分簡潔,給用戶最優質的視覺體驗。
4.后臺系統很強大,不會出現卡頓閃退現象。
5.可以自定義更改后臺參數,畫質,音效等等都可以自由更改。
6.使用過程沒有任何的垃圾廣告干擾,給用戶最綠色的使用環境。

怎么用
1、使用過程中,定要在后臺停止游戲啟動,然后給您進行修改,然后再玩游戲,查則沒有效果
2、部分倍率的靈敏度沒有修改成功,即本地不存在該倍率的靈敏度配置信息(游戲默認值)

3、需要在游戲中隨意調節倍率靈敏度參數,讓本地游戲保存倍率靈敏度設置配置信息,然后退出游戲打開本軟件進行修改

4、修改成功后,點擊“_”號進行微調。不要點擊“”或拖動調節條,否則靈敏度會再次降至400以下。

軟件優勢
1、能夠進行陀螺儀的超頻處理,進行個性化調節;
2、支持多種平臺,可適用于各種游戲;
3、內置常見錯誤自動修復機制,有效提高修復效率;
4、可以自動備份游戲數據,防止數據丟失。
調整方法
1、檢查鏡頭視場角是否存在異常;
2、確認陀螺儀方向標定是否正常,正常矯正后數據應在 0 上下震動;
3、核實在線零偏是否處于正常狀態;
4、防抖模式選用錄像模式,即 record 或 ipc 模式;
5、確認陀螺儀數據組數是否正常:
5.1、測試用 iim42652 陀螺儀,fifo 模式取數據,1000HZ 采樣率間隔 5ms,hi3516dv500 需按廠家說明配置,測試時 50ms 一次易缺失數據;
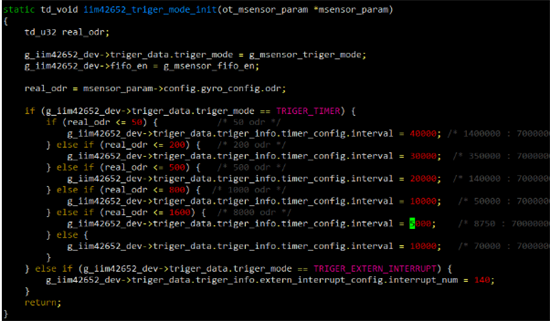
5.2、hi3516dv300 中 vi 獲取的陀螺儀數據,設置裁剪坐標后在 vpss 進行裁剪;
6、防抖效果測試宜在曝光時間小于 10ms 時進行,過短效果不佳;
7、默認 spi 通信 10M 數據,i2c 數據低可能導致數據獲取不及時;
8、vi chn 開低延時會使陀螺儀防抖畫面縮放,關閉即可解決。
常見問題
1、采樣率是什么,和靈敏度一樣嗎?
答:采樣率是陀螺儀每秒回報數據次數,與靈敏度無關。采樣率高反應快,但會增加發熱耗電,需自行權衡;
2、為什么實際采樣率和設置的略微不一致?
答:實際采樣率會被安卓系統量化處理,如 81-100Hz 區間設置,實際采樣率均為 100Hz;
3、最大采樣率是多少?
答:由陀螺儀硬件決定,一般至少 200Hz,將采樣率拉滿可啟用最大采樣率;
4、有除了發熱耗電之外的副作用嗎?
答:高采樣率可能讓 CF 手游內輔瞄變弱,機制不明且時有時無;
5、一定得進游戲前啟動本 APP,才能生效嗎?
答:任何時候啟動都可立即生效,陀螺儀采樣率會馬上提升。
原理分析
物體旋轉時,不受外力影響則旋轉軸方向不變,可用于測量角位移或角速度。
1、核心工作原理:角動量守恒定律
系統合外力矩為零時角動量保持不變。角動量是物體矢徑與動量的叉積:
(1) 矢量計算:點積 a?b=abcosθ(標量),叉積 a×b=absinθ(矢量,方向由右手螺旋定則確定);
(2) 角動量計算:r 為矢徑(到旋轉中心距離與方向),p 為動量(mv,方向與線速度一致),示例中 L 方向豎直向上;
(3) 陀螺角動量守恒:無空氣阻力、接觸面極小時,合外力矩為 0,角動量守恒。
2、陀螺儀的基本特性:
(1) 定軸性:轉子高速旋轉且無外力矩時,自轉軸指向穩定,反抗軸向改變;
(2) 進動性:轉子高速旋轉時,外力矩作用于外環軸則繞內環軸轉,作用于內環軸則繞外環軸轉,轉動方向與外力矩垂直。
3、測量的物理量:
(1) 角速度:測量偏轉、傾斜時的轉動角速度;
(2) 方向:俯仰角(繞 x 軸)、偏航角(繞 z 軸)、翻滾角(繞 y 軸)。
4、核心參數:
通用參數(傳感器):線性誤差、分辨率、采樣頻率;
陀螺儀重要參數:量程(dps)、靈敏度(刻度因子)、初始誤差、動態誤差、非線性度、初始零漂、零漂溫度系數。
5、慣性導航原理:
利用陀螺儀和加速度計測角速度與加速度,積分運算得速度和相對位置,結合初始位置,確定載體當前位置。
特別說明
軟件信息
- 廠商:ianovir
- 包名:com.ianovir.hyper_imu
- MD5:202B816F2BAEA0E7D468F3A78FF46D20

 陀螺儀延遲修復器
陀螺儀延遲修復器
 陀螺儀MC
陀螺儀MC
 陀螺儀修復器7.0
陀螺儀修復器7.0
 陀螺儀超頻助手最新版
陀螺儀超頻助手最新版












 奇兔刷機手機版
奇兔刷機手機版
 GooglePlay官方正版
GooglePlay官方正版
 V-Appstore官方版
V-Appstore官方版
 Uptodown應用商店
Uptodown應用商店
 webview
webview
 百度網盤app
百度網盤app
 應用隱藏計算器
應用隱藏計算器
 OPPO瀏覽器
OPPO瀏覽器
 ES文件瀏覽器
ES文件瀏覽器