



使用教程
1、打開軟件后,系統會彈出彈窗,需仔細閱讀隱私協議,無問題即可進入下一步;

2、系統要求觸摸綠色圓點,按照提示完成相應操作;

3、選擇對應項目進行勾選,確保所選內容符合需求;

4、完成勾選后,系統將自動開展檢測與校正工作。

軟件亮點
1、界面設計簡潔直觀,操作便捷,可輕松完成陀螺儀檢測、修復與校準;
2、提供個性化設置,能依自身需求調整界面布局、參數等,適配使用習慣;
3、在虛擬現實設備中,可自定義陀螺儀靈敏度與響應速度,優化使用體驗;
4、注重數據安全,對用戶數據加密存儲與傳輸,防止泄露和篡改,保障隱私。
軟件優勢
1、檢測陀螺儀狀態:檢查是否正常工作,排查漂移、延遲、無響應等問題;
2、校準陀螺儀:通過特定算法與步驟重新校準,消除偏差,提升感應精度;
3、調整采樣率:可調整數據采樣頻率,平衡靈敏度、精確性與系統負擔;
4、自定義參數設置:提供靈敏度、軸向調整等高級選項,適配不同應用場景;
5、修復潛在問題:嘗試解決導致陀螺儀異常的軟件或配置問題,恢復正常功能。
軟件特色
1、穩定性與可靠性高:能在復雜環境下穩定運行,確保檢測修復工作順利開展;
2、具備游戲優化功能:提升游戲幀率與穩定性,減少卡頓掉幀,優化畫面;
3、優化大型 3D 游戲體驗:通過改善陀螺儀性能,提高游戲操控性與流暢度;
4、支持社區交流:可在社區分享使用經驗、修復技巧與游戲心得,相互交流。
調整方法
1、檢查鏡頭視場角是否存在異常;
2、確認陀螺儀方向標定是否正常,正常矯正后數據應在 0 上下震動;
3、核實在線零偏是否處于正常狀態;
4、防抖模式選用錄像模式,即 record 或 ipc 模式;
5、確認陀螺儀數據組數是否正常:
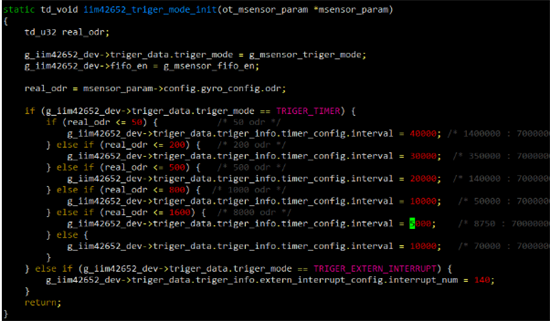
5.1、測試用 iim42652 陀螺儀,fifo 模式取數據,1000HZ 采樣率間隔 5ms,hi3516dv500 需按廠家說明配置,測試時 50ms 一次易缺失數據;
5.2、hi3516dv300 中 vi 獲取的陀螺儀數據,設置裁剪坐標后在 vpss 進行裁剪;
6、防抖效果測試宜在曝光時間小于 10ms 時進行,過短效果不佳;
7、默認 spi 通信 10M 數據,i2c 數據低可能導致數據獲取不及時;
8、vi chn 開低延時會使陀螺儀防抖畫面縮放,關閉即可解決。
常見問題
1、采樣率是什么,和靈敏度一樣嗎?
答:采樣率是陀螺儀每秒回報數據次數,與靈敏度無關。采樣率高反應快,但會增加發熱耗電,需自行權衡;
2、為什么實際采樣率和設置的略微不一致?
答:實際采樣率會被安卓系統量化處理,如 81-100Hz 區間設置,實際采樣率均為 100Hz;
3、最大采樣率是多少?
答:由陀螺儀硬件決定,一般至少 200Hz,將采樣率拉滿可啟用最大采樣率;
4、有除了發熱耗電之外的副作用嗎?
答:高采樣率可能讓 CF 手游內輔瞄變弱,機制不明且時有時無;
5、一定得進游戲前啟動本 APP,才能生效嗎?
答:任何時候啟動都可立即生效,陀螺儀采樣率會馬上提升。
原理分析
物體旋轉時,不受外力影響則旋轉軸方向不變,可用于測量角位移或角速度。
1、核心工作原理:角動量守恒定律
系統合外力矩為零時角動量保持不變。角動量是物體矢徑與動量的叉積:
(1) 矢量計算:點積 a?b=abcosθ(標量),叉積 a×b=absinθ(矢量,方向由右手螺旋定則確定);
(2) 角動量計算:r 為矢徑(到旋轉中心距離與方向),p 為動量(mv,方向與線速度一致),示例中 L 方向豎直向上;
(3) 陀螺角動量守恒:無空氣阻力、接觸面極小時,合外力矩為 0,角動量守恒。
2、陀螺儀的基本特性:
(1) 定軸性:轉子高速旋轉且無外力矩時,自轉軸指向穩定,反抗軸向改變;
(2) 進動性:轉子高速旋轉時,外力矩作用于外環軸則繞內環軸轉,作用于內環軸則繞外環軸轉,轉動方向與外力矩垂直。
3、測量的物理量:
(1) 角速度:測量偏轉、傾斜時的轉動角速度;
(2) 方向:俯仰角(繞 x 軸)、偏航角(繞 z 軸)、翻滾角(繞 y 軸)。
4、核心參數:
通用參數(傳感器):線性誤差、分辨率、采樣頻率;
陀螺儀重要參數:量程(dps)、靈敏度(刻度因子)、初始誤差、動態誤差、非線性度、初始零漂、零漂溫度系數。
5、慣性導航原理:
利用陀螺儀和加速度計測角速度與加速度,積分運算得速度和相對位置,結合初始位置,確定載體當前位置。
特別說明
軟件信息
- 包名:com.gyrofix
- MD5:80D00E58C5C28A2087DCF400C0FF565E



















 熊隊俠修改器
熊隊俠修改器
 熊貓俠游戲修改器
熊貓俠游戲修改器
 螃蟹賬號交易平臺
螃蟹賬號交易平臺
 ak加速器
ak加速器
 233游戲樂園官方正版
233游戲樂園官方正版
 7723游戲盒子app
7723游戲盒子app
 頑皮兔app
頑皮兔app
 pubjatant畫質修改官方版
pubjatant畫質修改官方版
 地鐵跑酷地圖切換工具中文版
地鐵跑酷地圖切換工具中文版